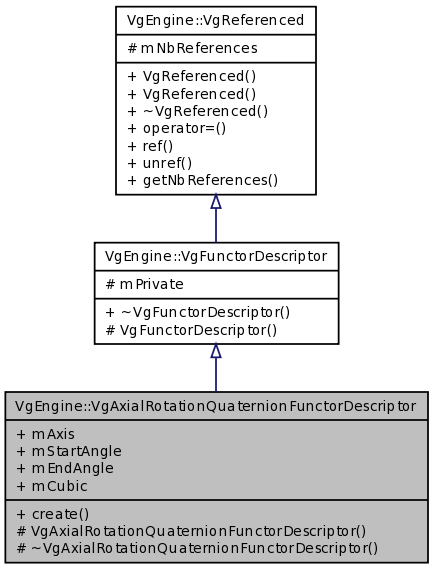
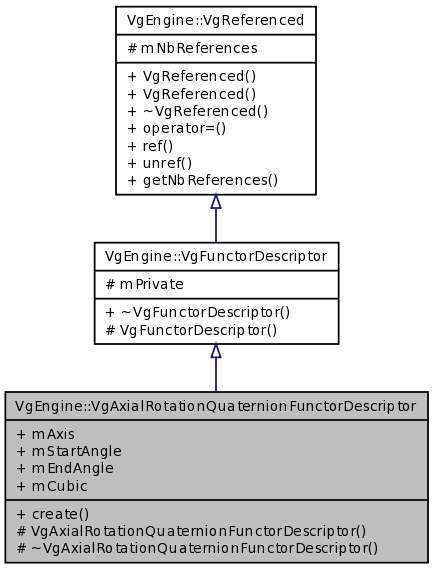
This class implements descriptors for axial rotation functors. More...
Static Public Member Functions | |
| static VgEngine::VgRefPtr < VgAxialRotationQuaternionFunctorDescriptor > | create () |
| This static method returns a new heap-allocated descriptor. | |
Public Attributes | |
| float | mAxis [3] |
| The rotation axis. | |
| float | mStartAngle |
| This is the starting rotation angle (in degrees). | |
| float | mEndAngle |
| This is the target rotation angle (in degrees). | |
| bool | mCubic |
| This boolean value tells whether a cubic function should be used to add acceleration and deceleration (true) or pure linear with constant velocity (false). | |
Protected Member Functions | |
| VgAxialRotationQuaternionFunctorDescriptor () | |
| Class constructor. | |
| virtual | ~VgAxialRotationQuaternionFunctorDescriptor () |
| Class destructor. | |
Friends | |
| class | VgObjectBridge |
Detailed Description
This class implements descriptors for axial rotation functors.
It will simply interpolate between two angle values and apply rotation of the given angle along the axis. It is possible to set the functor to use a cubic function to have acceleration at start and deceleration at end.
- Version:
- 2.0.7729
Constructor & Destructor Documentation
| VgEngine::VgAxialRotationQuaternionFunctorDescriptor::VgAxialRotationQuaternionFunctorDescriptor | ( | ) | [protected] |
Class constructor.
| virtual VgEngine::VgAxialRotationQuaternionFunctorDescriptor::~VgAxialRotationQuaternionFunctorDescriptor | ( | ) | [protected, virtual] |
Class destructor.
Member Function Documentation
| static VgEngine::VgRefPtr< VgAxialRotationQuaternionFunctorDescriptor > VgEngine::VgAxialRotationQuaternionFunctorDescriptor::create | ( | ) | [static] |
This static method returns a new heap-allocated descriptor.
It is the only method that should be used to instantiate new descriptors. It is a way to make sure no one will delete it, except the last VgRefPtr pointing to it.
Friends And Related Function Documentation
friend class VgObjectBridge [friend] |
Reimplemented from VgEngine::VgFunctorDescriptor.
Member Data Documentation
The rotation axis.
- Warning:
- If axis vector length is not long enough (below 1e-6), the functor creation will fail.
This boolean value tells whether a cubic function should be used to add acceleration and deceleration (true) or pure linear with constant velocity (false).
This is the target rotation angle (in degrees).
This is the starting rotation angle (in degrees).
The documentation for this class was generated from the following file:
- VgAxialRotationQuaternionFunctorDescriptor.h